


















V souvislosti s automatizací za použití kobotů si již léta klademe otázku, zda je lze skutečně považovat za „kolaborativní“. Tuto otázku si často pokládají ti, kteří se zabývají například vztahem člověka a stroje nebo pracují v oblasti norem a certifikace.
Vztah člověka a stroje
Studie zkoumající spolupráci se často zabývají vztahem mezi člověkem a strojem a souvisejícími faktory bezpečnosti a rizika. Jednou ze situací je, když se stroj pohybuje nadměrnou rychlostí v blízkosti obsluhy nebo nastane střet stroje s obsluhou. Dalším příkladem může být, že pokud má stroj namontované chapadlo nebo nástroj a pohybuje se rychlostí odpovídající operacím, které provádí, tak nežádoucí náraz může způsobit škodu na zařízení nebo ohrozit zdraví operátora.
Normy a certifikace
Další metodou zkoumání spolupráce a ověřování scénářů je ta, kterou využívají odborníci na normy a certifikaci. Cílem odborníků na tuto oblast je dospět k závěrům, na základě kterých lze určit cesty a scénáře, jež definují, kdy lze výrobní situaci označit za spolupráci.
Tyto studie však účinnou odpověď na otázku spolupráce neposkytují.
Co když si, přinejmenším z pohledu průmyslového designéra, klademe špatnou otázku?
Úkolem designéra je ve skutečnosti co nejlépe využít stávající technologie a splnit tak požadavky aplikace, kterou má vytvořit. „Správná“ otázka by tedy mohla a měla spíše znít: je možné kobota efektivně využívat různými způsoby, nebo plní pouze kolaborativní funkci?
Když průmyslový designer rozliší to, „kdy“ je spolupráce při automatizaci a v různých fázích výroby skutečně nutná, může si vytvořit představu o dalších krocích (a dospět tak k užitečné odpovědi na tuto hádanku).
V některých situacích koboti mohou a měli by být kolaborativní. Představte si fázi montáže, při níž robot a člověk pracují ve stejném pracovním prostoru, nebo fázi, jejíž provedení vyžaduje manuální ovládání.
Ale kdy už není potřeba? Kdy má robot vykonávat úkoly – například servis, utěsňování nebo balení – při kterých je role obsluhy okrajová nebo spíše nezahrnuje činnost, ale kontrolu a řízení?
V tom případě již není nezbytně nutné, aby technologie byla kolaborativní. Pak by stačilo robota „fyzicky přesunout“ z jednoho místa na lince na druhé a umožnit mu provádět různé úkony potřebné k optimalizaci automatizace a pracovat se „stupni spolupráce“, které aplikace v každé konkrétní fázi skutečně vyžaduje.
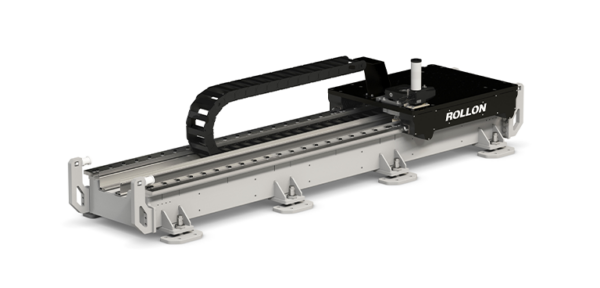
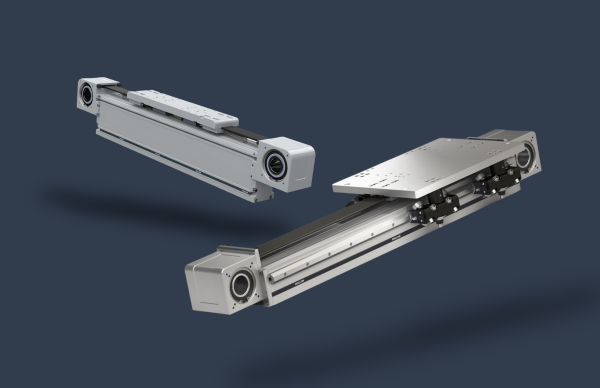
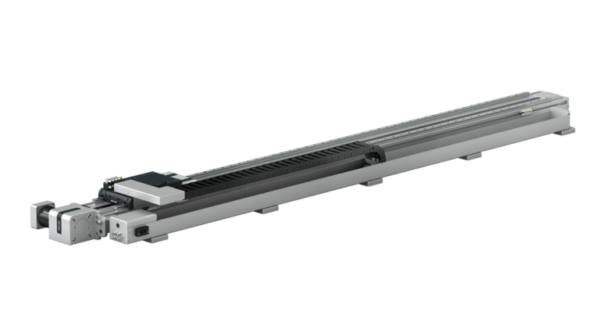
Je to proveditelné. A právě v tento moment přichází na scénu přenosová jednotka pro spolupracující roboty (tzv. CTU) společnosti Rollon.

Četné výhody lineárního přenosu kobotů
Přenosová jednotka pro spolupracující roboty od společnosti Rollon představuje kompletní řešení připravené k instalaci, které bylo vyvinuto s cílem zvýšit dosah kobotů – počínaje koboty od výrobce Universal Robots – v automatizovaných procesech v celé řadě průmyslových odvětví. Sedmá „speciální“ osa vyvinutá pro pohyb kolaborativních antropomorfních robotů.
Výhody CTU:
- VĚTŠÍ AKČNÍ RÁDIUS: zásluhou maximální dráhy, která je dokonce větší než standardních 5 500 mm v katalogu, se akční rádius kobota značně zvětšil.
- FUNKCE PLUG AND PLAY: CTU disponuje intuitivním rozhraním pro rychlé programování v softwaru Rollon a specifickou ladicí funkcí pro řešení případných chyb během procesu programování. Software Rollon může řídit až šest dalších os, čímž se rozšiřuje oblast použití na mnoho různých pracovních oblastí.
- RYCHLÁ INSTALACE: CTU má spojovací desku speciálně pro koboty, která zajišťuje rychlou montáž robotického ramene na osu.
- HORIZONTÁLNÍ, VERTIKÁLNÍ A PODLAHOVÁ MONTÁŽ: ideální pro manipulaci s materiálem, montáž, distribuci, kontrolu kvality a dokončovací práce.
Součástí balení jsou kompaktní elektrický panel, motor, pohon, redukční převodovka a kabely. CTU má také několik bezpečnostních funkcí, jako je simultánní, manuální (na ovládacím panelu) a automatické nouzové zastavení, jež se aktivuje na pokyn bezpečnostních systémů kobota, které rovněž zablokují osu. Osu lze dovybavit externími bezpečnostními senzory, například laserovými, optickými a radarovými skenery.
CTU může v neposlední řadě využívat také pneumatické brzdy pro zablokování podvozku na kolejnici, zatímco parametry rychlosti a zrychlení (V = 1,5 m/s, A = 3 m/s2) se optimalizují pro provoz s koboty od UR, což usnadňuje spolupráci.
Ke skutečné (a možné) spolupráci dochází tehdy, když je opravdu nezbytná.
CTU proto představuje špičkové řešení mezi zařízeními s lineárním pohybem a zároveň nástroj průmyslové automatizace, který snoubí spolupráci robotů s pohybem, a to i po dlouhých drahách.
CTU tedy nabízí jak (kolaborativního) robota, tak možnost lineárního přenosu, takže je možné jej využívat jako opravdového průmyslového antropomorfního robota, když je tento aspekt potřeba.
Musí být „kolaborativní“? Pak tuto funkci může plnit kobot. Potřebujete maximální rychlost a výkonnost robota? Pak se kobot přesune na bezpečné místo, kde úkon vykoná.